除了 AI Agent 以外,具身機器人是另一大 AI 時代的垂直落地場景。Morgan Stanley 曾在一份報告中預測,2050 年全球人形機器人整體市場規模有望突破 5 萬億美元。
伴隨著 AI 的發展,機器人將逐漸從工廠里的機械臂逐步進化為我們日常生活中的同伴,依靠 AI 而獲得感知和理解力,以至于獲得獨立決策的能力。問題是,今天的機器人更像是一群不會互相說話的啞巴:每家廠商用自己的語言、自己的邏輯,軟件互不兼容,智能彼此無法共享。這就像你買了一輛小米、一輛特斯拉,但它們連路況都無法一起判斷,更別提協同完成任務了。
OpenMind 想要改變的,正是這個各自為戰的局面。他們不造機器人,而是要搭建一個讓機器人說同一種語言、遵守同一套規則、一起完成事情的協作系統。打個比方,iOS 和安卓讓手機智能應用爆發,以太坊讓加密世界有了共同底座,而 OpenMind 想做的,是為全球機器人打造一個統一的操作系統和協作網絡。
一句話,OpenMind 正在構建機器人的通用操作系統,讓機器人不僅可以感知和行動,還可以通過去中心化協同,在任意環境下安全且規模化的合作。
誰在托舉這套開放底座
OpenMind 已完成 2000 萬美元的種子輪與 A 輪,由 Pantera Capital 領投。更重要的是,資本的廣度與互補幾乎把這條賽道的關鍵拼圖都帶齊了:一端是來自西方科技與金融生態的長期力量——Ribbit、Coinbase Ventures、DCG、Lightspeed Faction、Anagram、Pi Network Ventures、Topology、Primitive Ventures——他們熟悉加密與 AI 基礎設施的范式遷移,能夠為智能體經濟 + 機器互聯網提供模型、網絡與合規的經驗;另一端是東方的產業動能——以紅杉中國為代表的供應鏈與制造體系——深知把一臺樣機做成可規模交付的產品意味著哪些工藝與成本門檻。兩股力量的疊加,讓 OpenMind 不只拿到錢,更拿到從實驗室到產線、從軟件到底層制造的路徑與資源。

這條路徑也正在和傳統資本市場接軌。2025 年 6 月,KraneShares 推出全球人形與具身智能指數 ETF(KOID)時,選用了由 OpenMind 與 RoboStore 聯合定制的人形機器人 Iris 在納斯達克敲響開市鐘,成為交易所歷史上首位完成這一儀式的機器人來賓。這既是一次技術與金融敘事的同頻,也是一種關于機器資產如何被定價與結算的公開信號。
正如 Pantera Capital 合伙人 Nihal Maunder 所說:
如果我們希望智能機器在開放環境中運行,就需要一個開放的智能網絡。OpenMind 正在為機器人做的事,就像 Linux 之于軟件、以太坊之于區塊鏈。
從實驗室到產線的團隊
OpenMind 的創始人 Jan Liphardt 為斯坦福大學副教授、前伯克利教授,長期研究數據與分布式系統,在學界與工程側均有深耕。他主張推進開源復用、以可審計、可追溯的機制替代黑箱、用跨學科方法整合 AI、機器人和密碼學。
OpenMind 的核心團隊來自 OKX Ventures、Oxford Robotics Institute、Palantir、Databricks、Perplexity 等機構,覆蓋機器人控制、感知與導航、多模態與 LLM 調度、分布式系統與鏈上協議等關鍵環節。同時,一支由學術界與產業界專家組成的顧問團隊(如 Stanford 機器人負責人 Steve Cousins、牛津區塊鏈中心 Bill Roscoe、Imperial College 安全 AI 教授 Alessio Lomuscio)也為機器人的安全、合規、可靠提供保障。
OpenMind 的解法:兩層架構,一套秩序
OpenMind 構建了一套可復用的基礎設施,讓機器人能跨設備、跨廠商、甚至跨國界協作與信息互通:
設備側:提供面向實體機器人的 AI 原生操作系統 OM1,把從感知到執行的全鏈路連成閉環,讓不同形態的機器都能理解環境并完成任務;
網絡側:構建去中心化協作網絡 FABRIC,提供身份、任務分配與通信機制,確保機器人在協作時能識別彼此、分配任務、共享狀態。
這一套操作系統+網絡層的組合,讓機器人們不僅能各自行動,更能在一個統一的協作網絡中互相配合、對齊流程、一起完成某個復雜任務。
OM1:面向實體世界的 AI 原生操作系統
就像手機需要 iOS 或 Android 來運行應用,機器人同樣需要一個操作系統來運行 AI 模型、處理傳感器數據、做出推理決策并執行動作。
OM1 便為此而生,它是一個面向現實世界機器人的 AI 原生操作系統,讓它們能夠感知、理解、規劃并在各種環境中完成任務。與傳統、封閉的機器人控制系統不同,OM1 是開源、模塊化、硬件無關(hardware-agnostic)的,它可以運行人形、四足、輪式、機械臂等多種形態上。
四個核心環節:從感知到執行
OM1 把機器人智能拆解為四個通用步驟:Perception(感知)→ Memory(記憶)→ Planning(規劃)→ Action(執行)。這套流程被 OM1 完整模塊化,并通過統一的數據語言打通,實現可組合、可替換、可驗證的智能能力構建。
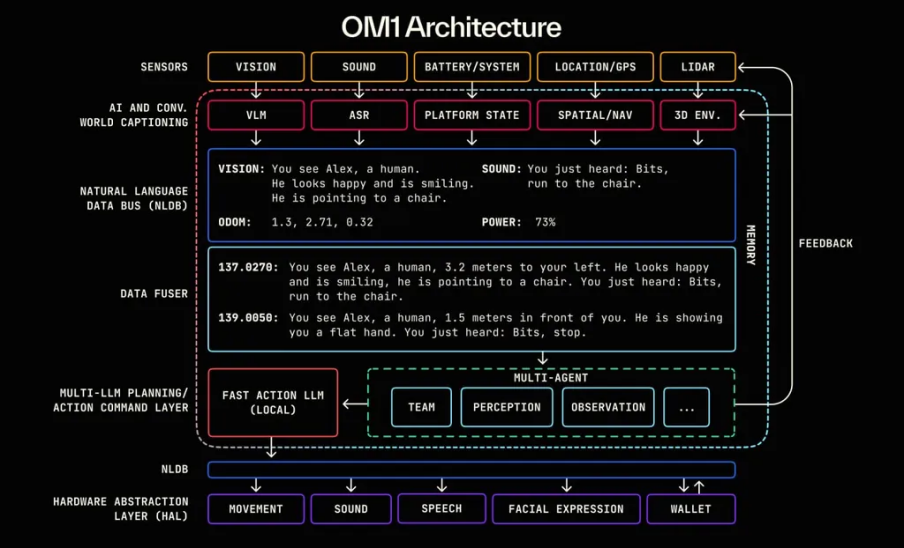
具體到架構,OM1 的七層鏈路如下:
Sensor Layer(傳感器層)收集信息:攝像頭、LIDAR、麥克風、電池狀態、GPS 等多模態進行感知輸入。
AI + World Captioning Layer(世界理解層)翻譯信息:多模態模型將視覺、語音、狀態轉為自然語言描述(如你看到一個人在揮手)。
Natural Language Data Bus(自然語言總線)傳遞信息:所有感知被轉成帶時間戳的語言片段,在不同模塊間傳遞。
Data Fuser(情境融合層)組合信息:整合多源輸入,生成用于決策的完整語境(prompt)。
Multi-AI Planning/Decision Layer(多智能體規劃層)生成決策:多個 LLM 讀取語境,結合鏈上規則生成行動計劃。
NLDB 下行通道:將決策結果通過語言中間層傳遞給硬件執行系統。
Hardware Abstraction Layer(硬件抽象層)做出行動:將語言指令轉為底層控制命令,驅動硬件執行(移動、語音播報、交易等)。
快速上手,廣泛落地
為把一個想法盡快變成機器人可執行的任務,OM1 把開發路徑做成了開箱即用的一條龍:開發者用自然語言結合大模型定義目標與約束,數小時內即可生成可復用的技能包,而不必經歷數月的硬編碼;多模態管線原生打通 LiDAR、視覺與音頻,省去手寫復雜的傳感器融合;模型側預接好 GPT-4o、DeepSeek 與主流 VLM,語音輸入輸出直接可用;系統層全面兼容 ROS2 與 Cyclone DDS,并通過 HAL 適配層無縫接入 Unitree G1、Go2、Turtlebot 與各類機械臂;同時與 FABRIC 的身份、任務編排與鏈上結算接口原生聯動,使機器人既能單機執行,也能加入全球協作網絡、按量計費與審計。
在真實世界里,OM1 已經完成多場景驗證:四足平臺 Frenchie(Unitree Go2)在 2024 年 USS Hornet 國防技術展示中跑通復雜場地任務,人形平臺 Iris(Unitree G1)在 2025 年 EthDenver 的 Coinbase 展臺完成現場人機交互,并通過 RoboStore 的教育項目走入全美高校課程,把同一套開發范式擴展到教學與科研的一線。
FABRIC:去中心化的人機協作網絡
即便單機智能足夠強,如果彼此無法在可信前提下協同,機器人仍舊只能各自為戰。現實里的割裂來自三個根本問題:身份與位置無法被標準化證明,導致我是誰、我在哪、我正在做什么難以被外部信任;技能與數據缺少可控的授權路徑,無法在多主體之間安全共享與調用;控制權與責任邊界不清,頻率、范圍和回傳條件難以被事先約定、事后追溯。FABRIC 針對這些痛點給出系統級解法:用去中心化協議為機器人與操作員建立可驗證的鏈上身份,圍繞該身份提供任務發布與匹配、端到端加密通信、執行記錄與自動結算的一體化基礎設施,讓協作從臨時對接變成有憑有據的制度。
在運行形態上,可以把 FABRIC 理解為把定位、連接、調度合在一起的網絡平面:身份與位置被持續簽名與校驗,使節點天然擁有彼此可見且可信的鄰近關系;點到點通道像一條按需建立的加密隧道,無需公網 IP 和復雜網絡設置就能遠程操控與監控;任務從發布到接單、執行到驗收的全過程被標準化記錄,既能在清算時自動分潤與退押,也能在合規或保險場景下復核誰在何時何地完成了什么。在此之上,典型應用自然生長出來:企業可以跨地域遠程運維設備,城市可以把清潔、巡檢、配送做成可按量調用的 Robot-as-a-Service,車隊可以實時匯報路況與障礙生成共享地圖,需要時還可就近調度機器人完成 3D 掃描、建筑測繪或保險取證。
隨著身份、任務與結算三件事被同一網絡托管,協作的邊界被事先寫清,執行的事實被事后驗證,技能的調用有了可度量的成本與收益。長期看,FABRIC 將演進為機器智能的應用分發層:技能以可編程的授權條款在全球范圍內流通,調用產生的數據又反哺模型與策略,使整張協作網絡在可信約束下持續自我升級。
Web3 正在把開放寫進機器社會
機器人行業正快速集中于少數平臺,硬件、算法與網絡被封閉棧鎖住。去中心化的價值,在于讓任何品牌、任意地域的機器人在同一開放網絡中協作、交換技能并完成結算,而不必依附單一平臺。OpenMind 用鏈上基礎設施把這一秩序編碼化:每臺機器人與操作員擁有唯一鏈上身份(ERC-7777),硬件指紋與權限可查;任務在公共規則下發布、競價與匹配,執行過程生成帶時間與位置的加密證明上鏈存證;任務完成后合約自動結算分潤、保險與押金,結果可實時核驗;新技能通過合約設定調用次數與適配設備,在保護知識產權的同時實現全球流通。由此,機器人經濟自誕生起就具備抗壟斷、可組合、可審計的基因,開放被寫進機器社會的底層協議。
讓具身智能走出孤島
機器人正從展臺走向日常:醫院里巡視病房,校園里學習新技能,城市里完成巡檢與建模。真正的難點不在更強的馬達,而在讓不同來源的機器彼此可信、信息互通、協同辦事;要規模化,技術之外更關鍵的是分發與供給。
OpenMind 的落地路徑因此從渠道入手而不是堆疊參數。與 RoboStore(宇樹在美國最大的經銷商之一)聯手,把 OM1 做成標準化教材與實驗套件,在全美幾千所高校同步推進軟硬件的一體化供給。教育體系算得上是最穩的需求側,這條鏈路直接把 OM1 植入未來幾年的開發者與應用增量。
面向更廣的社會分發,OpenMind 依托投資人生態把軟件的出海口做成平臺化。Pi 等體量龐大的加密生態也為這一模式增添了想象力,逐步形成有人寫、有人用、有人付費的正向飛輪。由教育渠道提供穩定的供給,由平臺分發帶來規模的需求,OM1 與上層應用由此具備可復制的擴張軌跡。
在 Web2 時代,機器人多被鎖在單一廠商的封閉棧里,功能與數據難以跨平臺流動;當教材標準與分發平臺接上之后,OpenMind 把開放變成默認設置:同一套系統進入校園、走向產業,再通過平臺網絡持續擴散,讓開放成為規模化落地的默認起點。